Apollo 3.5 版本,代码地址:
apollo/modules/perception/camera/lib/traffic_light/。
交通信号灯感知,使用摄像头获取当前车道对应红绿灯的状态。
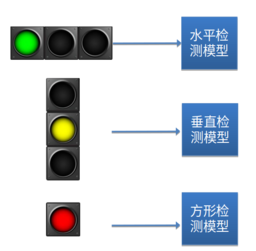
支持的灯形:
支持的颜色:
- 红
- 绿
- 黄
- 黑
使用长焦、短焦两个相机:
- 长焦相机(12mm焦距):观察前方远距离的信号灯,视野较小;
- 短焦相机(6mm焦距):视野较大,观察近处信号灯。
输入:
- 相机图像 channel
- 相机参数(内外参)
- HDMap
- 无人车定位
- V2X 红绿灯结果
输出:
- { Timestamp, {Signal ID, Detected BBox, Signal Color} }
1 Onboard 部分
modules/perception/onboard/component/trafficlights_perception_component.h modules/perception/onboard/component/trafficlights_perception_component.cc
TrafficLightsPerceptionComponent: 红绿灯模块对应的 CyberRT 组件
对应 dag 文件:
modules/perception/production/dag/dag_streaming_perception_trafficlights.dag
module_config { module_library : "/apollo/bazel-bin/modules/perception/onboard/component/libperception_component_camera.so" components { class_name : "TrafficLightsPerceptionComponent" config { name: "TrafficLightsComponent" config_file_path: "/apollo/modules/perception/production/conf/perception/camera/trafficlights_perception_component.config" flag_file_path: "/apollo/modules/perception/production/conf/perception/perception_common.flag" readers { channel: "/apollo/perception/traffic_light_status" } } } }
处理入口函数:
void TrafficLightsPerceptionComponent::OnReceiveImage( const std::shared_ptr<apollo::drivers::Image> msg, // 图像消息 const std::string& camera_name // 相机名 );
这是一个回调(callback)函数,当接收到对应相机的图像消息时自动调用。
OnReceiveImage() 主要处理流程:
1. 投影选相机 查询定位和地图信号灯信息,根据信号灯在图像平面上的投影情况选择用于检测红绿灯的相机,保存相机选择结果。 2. 判断当前图像时间戳和上一次处理时间戳间隔,若间隔过小,跳过 这一步是为了降低实际检测的处理频率,红绿灯检测不需要很高的帧率 3. 同步当前图像和相机选择结果 判断当前图像是否来自于要用于检测红绿灯的相机。如果不是则直接返回,不用继续处理当前图像;如果是则继续进行下一步。 4. 调用红绿灯检测算法模块,给出红绿灯识别结果 - Detect: 检测,根据地图红绿灯投影在 Crop ROI 中检测红绿灯 2D 框 - Recognize: 识别,对检测出的红绿灯 2D 框内容进行分类(红、绿、黑、黄) - Revise: 修正,处理可能出现的漏检(Unknown)、误识别情况 5. 同步感知红绿灯识别结果和 V2X 红绿灯结果,输出。
相关代码:
void TrafficLightsPerceptionComponent::OnReceiveImage( const std::shared_ptr<apollo::drivers::Image> msg, const std::string& camera_name) { std::lock_guard<std::mutex> lck(mutex_); // ... camera::TLPreprocessorOption preprocess_option; preprocess_option.image_borders_size = &image_border_sizes_; // 1. 投影选相机 // UpdateCameraSelection() 实现了根据信号灯投影选择相机的功能 // query pose and signals, add cached camera selection by lights' projections if (!UpdateCameraSelection(image_msg_ts, preprocess_option, &frame_)) { AWARN << "add_cached_camera_selection failed, ts: " << std::to_string(image_msg_ts); } const auto update_camera_selection_time = PERCEPTION_PERF_BLOCK_END_WITH_INDICATOR(perf_indicator, "UpdateCameraSelection"); // 2. 判断当前图像时间戳和上一次处理时间戳间隔,若间隔过小,跳过 // skipping frame according to last proc image timestamp if (last_proc_image_ts_ > 0.0 && receive_img_timestamp - last_proc_image_ts_ < proc_interval_seconds_) { // ... return; } // 3. 同步当前图像和相机选择结果 // sync image with cached projections bool sync_image_ok = preprocessor_->SyncInformation(image_msg_ts, camera_name); const auto sync_information_time = PERCEPTION_PERF_BLOCK_END_WITH_INDICATOR( perf_indicator, "SyncInformation"); // 当前图像不是来自于要选用的相机,直接返回,不需要进行后续的检测、识别 if (!sync_image_ok) { // ... return; } // ... // 由于存在跳帧策略,选相机时查 pose 的时间和当前图像的时间可能不同步,再查一次 pose 进行投影 // 确保得到的投影准确 if (!VerifyLightsProjection(image_msg_ts, preprocess_option, camera_name, &frame_)) { AINFO << "VerifyLightsProjection on image failed, ts: " << std::to_string(image_msg_ts) << ", camera_name: " << camera_name << " last_query_tf_ts_: " << std::to_string(last_query_tf_ts_) << " need update_camera_selection immediately," << " reset last_query_tf_ts_ to -1"; last_query_tf_ts_ = -1.0; } // 4. 调用红绿灯检测算法模块,给出红绿灯识别结果 traffic_light_pipeline_->Perception(camera_perception_options_, &frame_); // 5. 同步感知红绿灯识别结果和 V2X 红绿灯结果 SyncV2XTrafficLights(&frame_); // 发送结果消息 // ... } // V2X 红绿灯消息回调函数 void TrafficLightsPerceptionComponent::OnReceiveV2XMsg( const std::shared_ptr<apollo::v2x::IntersectionTrafficLightData> v2x_msg) { std::lock_guard<std::mutex> lck(mutex_); v2x_msg_buffer_.push_back(*v2x_msg); } void TrafficLightsPerceptionComponent::SyncV2XTrafficLights( camera::CameraFrame* frame) { const double camera_frame_timestamp = frame->timestamp; auto sync_single_light = [&](base::TrafficLightPtr light) { for (auto itr = v2x_msg_buffer_.rbegin(); itr != v2x_msg_buffer_.rend(); ++itr) { double v2x_timestamp = (*itr).header().timestamp_sec(); // 从 V2X 消息缓存中找到时间戳足够接近的一帧 if (std::fabs(camera_frame_timestamp - v2x_timestamp) < v2x_sync_interval_seconds_) { const int v2x_lights_num = (*itr).current_lane_trafficlight().single_traffic_light_size(); const auto& v2x_lights = (*itr).current_lane_trafficlight(); for (int i = 0; i < v2x_lights_num; ++i) { const auto& v2x_light = v2x_lights.single_traffic_light(i); // 利用 Signal ID 进行对应 if (light->id != v2x_light.id()) { continue; } base::TLColor v2x_color = base::TLColor::TL_UNKNOWN_COLOR; bool blink = false; switch (v2x_light.color()) { default: case apollo::v2x::SingleTrafficLight::UNKNOWN: v2x_color = base::TLColor::TL_UNKNOWN_COLOR; break; case apollo::v2x::SingleTrafficLight::RED: v2x_color = base::TLColor::TL_RED; break; case apollo::v2x::SingleTrafficLight::YELLOW: v2x_color = base::TLColor::TL_YELLOW; break; case apollo::v2x::SingleTrafficLight::GREEN: v2x_color = base::TLColor::TL_GREEN; break; case apollo::v2x::SingleTrafficLight::BLACK: v2x_color = base::TLColor::TL_BLACK; break; case apollo::v2x::SingleTrafficLight::FLASH_GREEN: v2x_color = base::TLColor::TL_GREEN; blink = true; break; } // 完全相信 V2X 的结果 AINFO << "Sync V2X success. update color from " << static_cast<int>(light->status.color) << " to " << static_cast<int>(v2x_color) << "; signal id: " << light->id; light->status.color = v2x_color; light->status.blink = blink; } break; } } }; for (auto& light : frame->traffic_lights) { sync_single_light(light); } }
2 算法部分
modules/perception/camera/lib/traffic_light ├── preprocessor └── detector └── detection └── recognition └── tracker
2.1 preprocessor
预处理,主要完成的任务是通过投影地图信号灯到图像平面来选择相机。
preprocessor/ ├── tl_preprocess.proto # 配置定义 ├── tl_preprocessor.cc ├── tl_preprocessor.h # 投影选相机预处理 (*) ├── pose.cc ├── pose.h # 主车和相机 Pose 封装 ├── multi_camera_projection.cc └── multi_camera_projection.h # 多相机投影
tl_preprocessor.cc 主要函数介绍:
// 投影选相机 bool TLPreprocessor::UpdateCameraSelection( const CarPose &pose, const TLPreprocessorOption &option, std::vector<base::TrafficLightPtr> *lights) { const double ×tamp = pose.getTimestamp(); selected_camera_name_.first = timestamp; selected_camera_name_.second = GetMaxFocalLenWorkingCameraName(); AINFO << "TLPreprocessor Got signal number: " << lights->size() << ", ts: " << std::to_string(timestamp); // 大部分情况下是没有信号灯的,此时我们默认选择焦距最大的相机,只是为了让红绿灯模块有输出 if (lights->empty()) { AINFO << "No signals, select camera with max focal length: " << selected_camera_name_.second; return true; } // ProjectLightsAndSelectCamera() 为具体投影选相机的方法 if (!ProjectLightsAndSelectCamera(pose, option, &(selected_camera_name_.second), lights)) { AERROR << "project_lights_and_select_camera failed, ts: " << std::to_string(timestamp); } return true; } bool TLPreprocessor::ProjectLightsAndSelectCamera( const CarPose &pose, const TLPreprocessorOption &option, std::string *selected_camera_name, std::vector<base::TrafficLightPtr> *lights) { // 两个数组,分别保存投影在/不在图像上的灯 for (auto &light_ptrs : lights_on_image_array_) { light_ptrs.clear(); } for (auto &light_ptrs : lights_outside_image_array_) { light_ptrs.clear(); } // project light region on each camera's image plane const auto &camera_names = projection_.getCameraNamesByDescendingFocalLen(); for (size_t cam_id = 0; cam_id < num_cameras_; ++cam_id) { const std::string &camera_name = camera_names[cam_id]; if (!ProjectLights(pose, camera_name, lights, &(lights_on_image_array_[cam_id]), &(lights_outside_image_array_[cam_id]))) { AERROR << "select_camera_by_lights_projection project lights on " << camera_name << " image failed"; return false; } } // ... // 根据投影结果选择相机 SelectCamera(&lights_on_image_array_, &lights_outside_image_array_, option, selected_camera_name); return true; } void TLPreprocessor::SelectCamera( std::vector<base::TrafficLightPtrs> *lights_on_image_array, std::vector<base::TrafficLightPtrs> *lights_outside_image_array, const TLPreprocessorOption &option, std::string *selected_camera_name) { // do not check boundary if this is min focal camera auto min_focal_len_working_camera = GetMinFocalLenWorkingCameraName(); AINFO << "working camera with minimum focal length: " << min_focal_len_working_camera; // 按照焦距从大到小遍历相机,检查是否有灯的投影 const auto &camera_names = projection_.getCameraNamesByDescendingFocalLen(); for (size_t cam_id = 0; cam_id < lights_on_image_array->size(); ++cam_id) { const auto &camera_name = camera_names[cam_id]; bool ok = true; if (camera_name != min_focal_len_working_camera) { // 有灯无法投影到该相机上,跳过 if (lights_outside_image_array->at(cam_id).size() > 0) { AINFO << "light project out of image, " << "camera_name: " << camera_name << " lights_outside_image_array->at(cam_id).size(): " << lights_outside_image_array->at(cam_id).size(); continue; } // 投影边界检查 auto lights = lights_on_image_array->at(cam_id); for (const auto light : lights) { // check boundary if (OutOfValidRegion(light->region.projection_roi, projection_.getImageWidth(camera_name), projection_.getImageHeight(camera_name), option.image_borders_size->at(camera_name))) { ok = false; AINFO << "light project out of image region, " << "camera_name: " << camera_name << " border_size: " << option.image_borders_size->at(camera_name); break; } } } else { // do not checkout the boundary if this is min focal camera ok = (lights_on_image_array->at(cam_id).size() > 0); } if (ok) { *selected_camera_name = camera_name; break; } } }
multi_camera_projection.cc :
bool MultiCamerasProjection::BoundaryBasedProject( const base::BrownCameraDistortionModelPtr camera_model, const Eigen::Matrix4d& c2w_pose, const std::vector<base::PointXYZID>& points, base::TrafficLight* light) const { CHECK_NOTNULL(camera_model.get()); int width = static_cast<int>(camera_model->get_width()); int height = static_cast<int>(camera_model->get_height()); int bound_size = static_cast<int>(points.size()); AINFO << "bound size " << bound_size; if (bound_size < 4) { AERROR << "invalid bound_size"; return false; } std::vector<Eigen::Vector2i> pts2d(bound_size); auto c2w_pose_inverse = c2w_pose.inverse(); // 将 HDMap 中的 signal 的 boundary points 投影到图像上 for (int i = 0; i < bound_size; ++i) { const auto& pt3d_world = points.at(i); Eigen::Vector3d pt3d_cam = (c2w_pose_inverse * Eigen::Vector4d(pt3d_world.x, pt3d_world.y, pt3d_world.z, 1.0)) .head(3); if (std::islessequal(pt3d_cam[2], 0.0)) { AWARN << "light bound point behind the car: " << pt3d_cam; return false; } pts2d[i] = camera_model->Project(pt3d_cam.cast<float>()).cast<int>(); } // 取投影点的 bounding box int min_x = std::numeric_limits<int>::max(); int max_x = std::numeric_limits<int>::min(); int min_y = std::numeric_limits<int>::max(); int max_y = std::numeric_limits<int>::min(); for (const auto& pt : pts2d) { min_x = std::min(pt[0], min_x); max_x = std::max(pt[0], max_x); min_y = std::min(pt[1], min_y); max_y = std::max(pt[1], max_y); } base::BBox2DI roi(min_x, min_y, max_x, max_y); if (OutOfValidRegion(roi, width, height) || roi.Area() == 0) { AWARN << "Projection get ROI outside the image. "; return false; } light->region.projection_roi = base::RectI(roi); return true; }
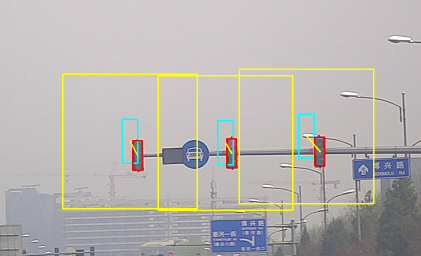
2.2 detector/detection
检测,根据灯的投影在 Crop ROI 中给出红绿灯 2D 框
detection/ ├── detection.proto # 配置定义 ├── detection.cc ├── detection.h # TrafficLightDetection (*) ├── cropbox.cc ├── cropbox.h # 用于根据红绿灯投影框获取 Crop ROI ├── select.cc └── select.h # 候选检测框与红绿灯投影框匹配
detection.cc 主要函数介绍:
bool TrafficLightDetection::Detect(const TrafficLightDetectorOptions &options, CameraFrame *frame) { // ... const auto &data_provider = frame->data_provider; auto input_blob = rt_net_->get_blob(net_inputs_[0]); // ... std::vector<base::TrafficLightPtr> &lights_ref = frame->traffic_lights; AINFO << "detection input " << lights_ref.size() << " lights"; // detected_bboxes_ 是模型给出的所有候选检测框 detected_bboxes_.clear(); // selected_bboxes_ 是匹配后的检测框 selected_bboxes_.clear(); // ... // 检测模型 inference Inference(&lights_ref, data_provider); for (size_t j = 0; j < detected_bboxes_.size(); ++j) { base::RectI ®ion = detected_bboxes_[j]->region.detection_roi; float score = detected_bboxes_[j]->region.detect_score; lights_ref[0]->region.debug_roi.push_back(region); lights_ref[0]->region.debug_roi_detect_scores.push_back(score); } // 匹配,为每个投影框选择一个检测框 select_.SelectTrafficLights(detected_bboxes_, &lights_ref); return true; } bool TrafficLightDetection::Inference( std::vector<base::TrafficLightPtr> *lights, DataProvider *data_provider) { // ... crop_box_list_.clear(); // 保存 Crop ROI resize_scale_list_.clear(); // 保存 2D 检测框缩放比例 int img_width = data_provider->src_width(); int img_height = data_provider->src_height(); int resize_index = 0; auto batch_num = lights->size(); auto input_img_blob = rt_net_->get_blob(net_inputs_[0]); auto input_param = rt_net_->get_blob(net_inputs_[1]); // 每个 Crop ROI 都 resize 到 [min_crop_size x min_crop_size] 再进行检测 input_img_blob->Reshape(static_cast<int>(batch_num), static_cast<int>(detection_param_.min_crop_size()), static_cast<int>(detection_param_.min_crop_size()), 3); param_blob_->Reshape(static_cast<int>(batch_num), 6, 1, 1); float *param_data = param_blob_->mutable_cpu_data(); for (size_t i = 0; i < batch_num; ++i) { auto offset = i * param_blob_length_; param_data[offset + 0] = static_cast<float>(detection_param_.min_crop_size()); param_data[offset + 1] = static_cast<float>(detection_param_.min_crop_size()); param_data[offset + 2] = 1; param_data[offset + 3] = 1; param_data[offset + 4] = 0; param_data[offset + 5] = 0; } for (size_t i = 0; i < batch_num; ++i) { base::TrafficLightPtr light = lights->at(i); base::RectI cbox; // 计算 Crop ROI crop_->getCropBox(img_width, img_height, light, &cbox); if (!OutOfValidRegion(cbox, img_width, img_height) && cbox.Area() > 0) { crop_box_list_.push_back(cbox); light->region.debug_roi[0] = cbox; light->region.crop_roi = cbox; data_provider_image_option_.do_crop = true; data_provider_image_option_.crop_roi = cbox; data_provider_image_option_.target_color = base::Color::BGR; data_provider->GetImage(data_provider_image_option_, image_.get()); // 保存缩放比例,用于还原原图像中的检测框 float resize_scale = static_cast<float>(detection_param_.min_crop_size()) / static_cast<float>(std::min(cbox.width, cbox.height)); resize_scale_list_.push_back(resize_scale); // 将所有 Crop ROI 都 resize 到相同大小 inference::ResizeGPU(*image_, input_img_blob, img_width, resize_index, mean_[0], mean_[1], mean_[2], true, 1.0); resize_index++; } } // Inference cudaDeviceSynchronize(); rt_net_->Infer(); cudaDeviceSynchronize(); // 还原原图像中的检测框 SelectOutputBoxes(crop_box_list_, resize_scale_list_, resize_scale_list_, &detected_bboxes_); // NMS,消除有重叠区域的 Crop ROIs 中重复的检测框 ApplyNMS(&detected_bboxes_); return true; }
cropbox.cc :
void CropBox::Init(float crop_scale, int min_crop_size) { crop_scale_ = crop_scale; // 缩放倍数 min_crop_size_ = min_crop_size; // 最小 crop size } void CropBox::getCropBox(const int width, const int height, const base::TrafficLightPtr &light, base::RectI *crop_box) { int rows = height; int cols = width; if (OutOfValidRegion(light->region.projection_roi, width, height) || light->region.projection_roi.Area() <= 0) { crop_box->x = 0; crop_box->y = 0; crop_box->width = 0; crop_box->height = 0; return; } int xl = light->region.projection_roi.x; int yt = light->region.projection_roi.y; int xr = xl + light->region.projection_roi.width - 1; int yb = yt + light->region.projection_roi.height - 1; // 取 projection roi 的长边,乘以 crop_scale 作为 Crop ROI 的边长 int center_x = (xr + xl) / 2; int center_y = (yb + yt) / 2; int resize = static_cast<int>(crop_scale_ * static_cast<float>(std::max( light->region.projection_roi.width, light->region.projection_roi.height))); // 限制 Crop ROI 最小边长 resize = std::max(resize, min_crop_size_); resize = std::min(resize, width); resize = std::min(resize, height); // 计算新的 left top 和 right bottom 点 xl = center_x - resize / 2 + 1; xl = (xl < 0) ? 0 : xl; yt = center_y - resize / 2 + 1; yt = (yt < 0) ? 0 : yt; xr = xl + resize - 1; yb = yt + resize - 1; if (xr >= cols - 1) { xl -= xr - cols + 1; xr = cols - 1; } if (yb >= rows - 1) { yt -= yb - rows + 1; yb = rows - 1; } crop_box->x = xl; crop_box->y = yt; crop_box->width = xr - xl + 1; crop_box->height = yb - yt + 1; }
select.cc :
void Select::SelectTrafficLights( const std::vector<base::TrafficLightPtr> &refined_bboxes, std::vector<base::TrafficLightPtr> *hdmap_bboxes) { // 将投影框和候选检测框进行匈牙利匹配 std::vector<std::pair<size_t, size_t> > assignments; munkres_.costs()->Resize(hdmap_bboxes->size(), refined_bboxes.size()); for (size_t row = 0; row < hdmap_bboxes->size(); ++row) { auto center_hd = (*hdmap_bboxes)[row]->region.detection_roi.Center(); // 地图灯的投影在图像外,对应 score 置 0 if ((*hdmap_bboxes)[row]->region.outside_image) { AINFO << "projection_roi outside image, set score to 0."; for (size_t col = 0; col < refined_bboxes.size(); ++col) { (*munkres_.costs())(row, col) = 0.0; } continue; } // 计算 score 矩阵 for (size_t col = 0; col < refined_bboxes.size(); ++col) { float gaussian_score = 100.0f; auto center_refine = refined_bboxes[col]->region.detection_roi.Center(); // use gaussian score as metrics of distance and width double distance_score = Calc2dGaussianScore( center_hd, center_refine, gaussian_score, gaussian_score); double max_score = 0.9; auto detect_score = refined_bboxes[col]->region.detect_score; double detection_score = detect_score > max_score ? max_score : detect_score; double distance_weight = 0.7; double detection_weight = 1 - distance_weight; // 图像上 2D 距离分数和检测模型 confidence 的加权平均 // 分数越大表示匹配程度越高 (*munkres_.costs())(row, col) = static_cast<float>(detection_weight * detection_score + distance_weight * distance_score); const auto &crop_roi = (*hdmap_bboxes)[row]->region.crop_roi; const auto &detection_roi = refined_bboxes[col]->region.detection_roi; // 如果候选检测框不是完全在当前 Crop ROI 之内, score 置 0 if ((detection_roi & crop_roi) != detection_roi) { AINFO << "detection_roi outside crop_roi, set score to 0." << " detection_roi: " << detection_roi.x << " " << detection_roi.y << " " << detection_roi.width << " " << detection_roi.height << " crop_roi: " << crop_roi.x << " " << crop_roi.y << " " << crop_roi.width << " " << crop_roi.height; (*munkres_.costs())(row, col) = 0.0; } AINFO << "score " << (*munkres_.costs())(row, col); } } // 求解匹配 munkres_.Maximize(&assignments); // 为每个灯分配检测框 for (size_t i = 0; i < hdmap_bboxes->size(); ++i) { (*hdmap_bboxes)[i]->region.is_selected = false; (*hdmap_bboxes)[i]->region.is_detected = false; } for (size_t i = 0; i < assignments.size(); ++i) { if (static_cast<size_t>(assignments[i].first) >= hdmap_bboxes->size() || static_cast<size_t>( assignments[i].second >= refined_bboxes.size() || (*hdmap_bboxes)[assignments[i].first]->region.is_selected || refined_bboxes[assignments[i].second]->region.is_selected)) { } else { auto &refined_bbox_region = refined_bboxes[assignments[i].second]->region; auto &hdmap_bbox_region = (*hdmap_bboxes)[assignments[i].first]->region; refined_bbox_region.is_selected = true; hdmap_bbox_region.is_selected = true; const auto &crop_roi = hdmap_bbox_region.crop_roi; const auto &detection_roi = refined_bbox_region.detection_roi; bool outside_crop_roi = ((crop_roi & detection_roi) != detection_roi); if (hdmap_bbox_region.outside_image || outside_crop_roi) { hdmap_bbox_region.is_detected = false; } else { hdmap_bbox_region.detection_roi = refined_bbox_region.detection_roi; hdmap_bbox_region.detect_class_id = refined_bbox_region.detect_class_id; hdmap_bbox_region.detect_score = refined_bbox_region.detect_score; hdmap_bbox_region.is_detected = refined_bbox_region.is_detected; hdmap_bbox_region.is_selected = refined_bbox_region.is_selected; } } } }
2.3 detector/recognition
识别,对检测结果进行分类,给出颜色识别结果
recognition/ ├── recognition.proto # 配置定义 ├── recognition.cc ├── recognition.h # TrafficLightRecognition (*) ├── classify.cc └── classify.h # classification inference
主要函数:
bool TrafficLightRecognition::Detect(const TrafficLightDetectorOptions& options, CameraFrame* frame) { std::vector<base::TrafficLightPtr> candidate(1); for (base::TrafficLightPtr light : frame->traffic_lights) { if (light->region.is_detected) { candidate[0] = light; // 检测模型输出的检测框有三个类别,分别对应方形、竖直和水平形状 // 每种形状都有一个识别模型 if (light->region.detect_class_id == base::TLDetectionClass::TL_QUADRATE_CLASS) { AINFO << "Recognize Use Quadrate Model!"; classify_quadrate_->Perform(frame, &candidate); } else if (light->region.detect_class_id == base::TLDetectionClass::TL_VERTICAL_CLASS) { AINFO << "Recognize Use Vertical Model!"; classify_vertical_->Perform(frame, &candidate); } else if (light->region.detect_class_id == base::TLDetectionClass::TL_HORIZONTAL_CLASS) { AINFO << "Recognize Use Horizonal Model!"; classify_horizontal_->Perform(frame, &candidate); } else { return false; } } else { // 未检测到,输出 Unknown color light->status.color = base::TLColor::TL_UNKNOWN_COLOR; light->status.confidence = 0; } } return true; }
2.4 tracker
修正,红绿灯语义、时序校正
tracker/ ├── semantic.proto # 配置定义 ├── semantic_decision.cc └── semantic_decision.h # SemanticReviser (*)
语义校正:
当前时刻,同一语义的红绿灯中,输出置信度最高的颜色。如果置信度最高的颜色有多种,输出数量最多的。如果数量相同,输出unknown(比如一红一绿)。
时序校正:
基于一些规则对模型结果进行后处理。例如,某帧漏检出现 unknown color,根据前 1.5 秒内有颜色的输出将当前帧结果修正为该颜色,保证输出结果稳定;黄灯误识别为红灯,将之后的颜色均校正为红色(硬策略,避免黄灯出现在红灯之后给 PnC 造成困扰)。
主要函数:
bool SemanticReviser::Track(const TrafficLightTrackerOptions &options, CameraFrame *frame) { double time_stamp = frame->timestamp; std::vector<base::TrafficLightPtr> &lights_ref = frame->traffic_lights; std::vector<SemanticTable> semantic_table; if (lights_ref.size() <= 0) { history_semantic_.clear(); ADEBUG << "no lights to revise, return"; return true; } // 根据信号灯语义进行分组 for (size_t i = 0; i < lights_ref.size(); i++) { base::TrafficLightPtr light = lights_ref.at(i); int cur_semantic = light->semantic; ADEBUG << "light " << light->id << " semantic " << cur_semantic; SemanticTable tmp; std::stringstream ss; if (cur_semantic > 0) { ss << "Semantic_" << cur_semantic; } else { ss << "No_semantic_light_" << light->id; } tmp.semantic = ss.str(); tmp.light_ids.push_back(static_cast<int>(i)); tmp.color = light->status.color; tmp.time_stamp = time_stamp; tmp.blink = false; auto iter = std::find_if(std::begin(semantic_table), std::end(semantic_table), boost::bind(compare, _1, tmp)); if (iter != semantic_table.end()) { iter->light_ids.push_back(static_cast<int>(i)); } else { semantic_table.push_back(tmp); } } // 时序校正 for (size_t i = 0; i < semantic_table.size(); ++i) { SemanticTable cur_semantic_table = semantic_table.at(i); ReviseByTimeSeries(time_stamp, cur_semantic_table, &lights_ref); } return true; }
// 保存同语义红绿灯信息的数据结构 // 假设同语义的红绿灯状态是一致的 struct SemanticTable { double time_stamp = 0.0; double last_bright_time_stamp = 0.0; double last_dark_time_stamp = 0.0; bool blink = false; // 是否闪烁 std::string semantic; // 语义 // semantic 是一个 4 位的 01 字符串,每一位分别标识 NO_TURN、U_TURN、LEFT_TURN、RIGHT_TURN // 如 `0010` 表示左转灯,`1010` 表示既控制左转也控制直行 std::vector<int> light_ids; // 红绿灯 ID base::TLColor color; };
同语义灯校正:
base::TLColor SemanticReviser::ReviseBySemantic( SemanticTable semantic_table, std::vector<base::TrafficLightPtr> *lights) { std::vector<int> vote(static_cast<int>(base::TLColor::TL_TOTAL_COLOR_NUM), 0); std::vector<base::TrafficLightPtr> &lights_ref = *lights; base::TLColor max_color = base::TLColor::TL_UNKNOWN_COLOR; // 相同语义的灯,记录每种颜色出现的次数 for (size_t i = 0; i < semantic_table.light_ids.size(); ++i) { int index = semantic_table.light_ids.at(i); base::TrafficLightPtr light = lights_ref[index]; auto color = light->status.color; vote.at(static_cast<int>(color))++; } // 只有黑色或者 unknown 的情况 if ((vote.at(static_cast<size_t>(base::TLColor::TL_RED)) == 0) && (vote.at(static_cast<size_t>(base::TLColor::TL_GREEN)) == 0) && (vote.at(static_cast<size_t>(base::TLColor::TL_YELLOW)) == 0)) { if (vote.at(static_cast<size_t>(base::TLColor::TL_BLACK)) > 0) { return base::TLColor::TL_BLACK; } else { return base::TLColor::TL_UNKNOWN_COLOR; } } vote.at(static_cast<size_t>(base::TLColor::TL_BLACK)) = 0; vote.at(static_cast<size_t>(base::TLColor::TL_UNKNOWN_COLOR)) = 0; // 出现数量最多的颜色 auto biggest = std::max_element(std::begin(vote), std::end(vote)); int max_color_num = *biggest; max_color = base::TLColor(std::distance(std::begin(vote), biggest)); vote.erase(biggest); auto second_biggest = std::max_element(std::begin(vote), std::end(vote)); // 如果数量最多的前两种颜色数量相同,返回 unknown if (max_color_num == *second_biggest) { return base::TLColor::TL_UNKNOWN_COLOR; } else { return max_color; } }
时序校正:
void SemanticReviser::ReviseByTimeSeries( double time_stamp, SemanticTable semantic_table, std::vector<base::TrafficLightPtr> *lights) { ADEBUG << "revise " << semantic_table.semantic << ", lights number:" << semantic_table.light_ids.size(); std::vector<base::TrafficLightPtr> &lights_ref = *lights; base::TLColor cur_color = ReviseBySemantic(semantic_table, lights); base::TLColor pre_color = base::TLColor::TL_UNKNOWN_COLOR; semantic_table.color = cur_color; semantic_table.time_stamp = time_stamp; ADEBUG << "revise same semantic lights"; ReviseLights(lights, semantic_table.light_ids, cur_color); std::vector<SemanticTable>::iterator iter = std::find_if(std::begin(history_semantic_), std::end(history_semantic_), boost::bind(compare, _1, semantic_table)); // 找相同 ID 的灯历史 revise_time_s_ (1.5 秒)内的颜色 // 如果当前颜色是黑灯或者 unknown,直接用历史颜色赋值 if (iter != history_semantic_.end()) { pre_color = iter->color; if (time_stamp - iter->time_stamp < revise_time_s_) { ADEBUG << "revise by time series"; switch (cur_color) { case base::TLColor::TL_YELLOW: if (iter->color == base::TLColor::TL_RED) { ReviseLights(lights, semantic_table.light_ids, iter->color); iter->time_stamp = time_stamp; iter->hystertic_window.hysteretic_count = 0; } else { UpdateHistoryAndLights(semantic_table, lights, &iter); ADEBUG << "High confidence color " << s_color_strs[cur_color]; } break; case base::TLColor::TL_RED: case base::TLColor::TL_GREEN: UpdateHistoryAndLights(semantic_table, lights, &iter); if (time_stamp - iter->last_bright_time_stamp > blink_threshold_s_ && iter->last_dark_time_stamp > iter->last_bright_time_stamp) { iter->blink = true; } iter->last_bright_time_stamp = time_stamp; ADEBUG << "High confidence color " << s_color_strs[cur_color]; break; case base::TLColor::TL_BLACK: iter->last_dark_time_stamp = time_stamp; iter->hystertic_window.hysteretic_count = 0; if (iter->color == base::TLColor::TL_UNKNOWN_COLOR || iter->color == base::TLColor::TL_BLACK) { iter->time_stamp = time_stamp; UpdateHistoryAndLights(semantic_table, lights, &iter); } else { ReviseLights(lights, semantic_table.light_ids, iter->color); } break; case base::TLColor::TL_UNKNOWN_COLOR: default: ReviseLights(lights, semantic_table.light_ids, iter->color); break; } } else { iter->time_stamp = time_stamp; iter->color = cur_color; } // set blink status if (pre_color != iter->color || fabs(iter->last_dark_time_stamp - iter->last_bright_time_stamp) > non_blink_threshold_s_) { iter->blink = false; } for (auto index : semantic_table.light_ids) { lights_ref[index]->status.blink = (iter->blink && iter->color == base::TLColor::TL_GREEN); } ADEBUG << "semantic " << semantic_table.semantic << " color " << s_color_strs[iter->color] << " blink " << iter->blink << " cur " << s_color_strs[cur_color]; ADEBUG << "cur ts " << std::to_string(time_stamp); ADEBUG << "bri ts " << std::to_string(iter->last_bright_time_stamp); ADEBUG << "dar ts " << std::to_string(iter->last_dark_time_stamp); } else { semantic_table.last_dark_time_stamp = semantic_table.time_stamp; semantic_table.last_bright_time_stamp = semantic_table.time_stamp; history_semantic_.push_back(semantic_table); } }