参考:
https://thispointer.com/category/multithreading/
使用 C++11 线程
<thread> 是 C++11 的线程库,构造函数可以传入 function pointer / functor / lambda:
使用 std::this_thread::get_id() 可以获取当前线程的 ID 。
#include <iostream> #include <thread> void thread_func1() { auto thread_id = std::this_thread::get_id(); std::cout << "thread_func1, id: " << thread_id << " " << std::endl; } int main(int argc, char **argv) { // thread 可以接受 function pointer/functor/lambda std::thread t1(thread_func1); std::thread t2([]() { auto thread_id = std::this_thread::get_id(); std::cout << "thread func lambda, id: " << thread_id << " " << std::endl; }); std::cout << "main thread, id: " << std::this_thread::get_id() << " " << std::endl; t1.join(); t2.join(); return 0; }
线程的 join 和 detach
join() 的含义就是等待线程完成工作,然后 join 回到当前线程。
int main(int argc, char **argv) { std::thread t1(func_ptr); // do something (main thread) t1.join(); // wait thread t1 to finish its job }
简单来说,t1.join() 就是等待 t1 线程完成,然后才会继续当前线程的操作。
可以用 std::this_thread::sleep_for() 让线程等待一定时间:
#include <iostream> #include <thread> #include <chrono> int main(int argc, char **argv) { std::cout << "before start thread t1\n"; std::thread t1([]() { int i = 0; while (i < 200) { ++i; // sleep 10 ms per iteration std::this_thread::sleep_for(std::chrono::milliseconds(10)); } std::cout << "t1 finished.\n"; }); std::cout << "do something in main thread.\n"; std::cout << "wait t1 to finish.\n"; // 主线程什么都没做,但是由于调用了 t1.join(),需要等待 t1 线程完成任务 t1.join(); std::cout << "done.\n"; return 0; }
可以一次创建多个线程,用一个 vector保存,注意下面 std::mem_fn 的作用是将一个类的成员函数包装成一个参数为对象的函数:
#include <iostream> #include <vector> #include <thread> #include <chrono> #include <functional> #include <algorithm> int main(int argc, char **argv) { auto thread_func = []() { std::cout << "thread id: " << std::this_thread::get_id() << std::endl; }; std::vector<std::thread> thread_list; for (int i = 0; i < 10; ++i) { thread_list.push_back(std::thread(thread_func)); } std::cout << "wait for all the worker thread to finish.\n"; std::for_each(thread_list.begin(), thread_list.end(), std::mem_fn(&std::thread::join)); std::cout << "main thread finished.\n"; return 0; }
detach 的作用是创建分离线程/后台线程/守护线程:
Detached threads are also called daemon / Background threads.
std::thread t1(func); t1.detach(); // After calling detach(), std::thread object // is no longer associated with the actual thread of execution.
- join是阻塞当前线程,并等待 thread object 对应的线程结束,当前线程继续执行
- detach 是将线程从当前线程分离出去,即不受阻塞,操作系统会将其独立对待
使用 detach() 函数会让线程在后台运行,即说明 主线程不会等待子线程运行结束才结束 。
通常称分离线程为守护线程(daemon threads), UNIX中守护线程是指,没有任何显式的用户接口,并在后台运行的线程。这种线程的特点就是长时间运行;线程的生命周期可能会从某一个应用起始到结束,可能会在后台监视文件系统,还有可能对缓存进行清理,亦或对数据结构进行优化。
看一个例子:
#include <iostream> #include <vector> #include <thread> #include <chrono> #include <functional> #include <algorithm> int main(int argc, char **argv) { auto thread_func = []() { std::cout << "thread id: " << std::this_thread::get_id() << std::endl; for (int i = 0; i < 20; ++i) { std::this_thread::sleep_for(std::chrono::milliseconds(10)); } }; std::thread t1(thread_func); t1.detach(); std::cout << "main thread finished.\n"; return 0; } // main thread finished. // thread id: 140529165158144 // 可以看到主线程没有等待 t1 线程完成就结束了
要注意,一旦调用 join() 或者 detach(),那么线程对象就不再与实际线程有关联了,要避免重复调用 join() / detach() 。
可以用 joinable() 判断:
std::thread t1(func1); if(t1.joinable()) { std::cout << "Detaching Thread." << std::endl; t1.detach(); } std::thread t2(func2); if(t2.joinable()) { std::cout << "Joining Thread." << std::endl; t2.join(); }
还有一点要注意,不要忘记调用线程对象的 join() / detach() 而直接 return:
#include <iostream> #include <vector> #include <thread> #include <chrono> #include <functional> #include <algorithm> int main(int argc, char **argv) { auto thread_func = []() { std::cout << "thread id: " << std::this_thread::get_id() << std::endl; for (int i = 0; i < 20; ++i) { std::this_thread::sleep_for(std::chrono::milliseconds(10)); } }; std::thread t1(thread_func); // Program will terminate as we have't called either join or detach with the std::thread object. // Hence std::thread's object destructor will terminate the program std::cout << "main thread finished.\n"; return 0; }
可以使用 RAII(Resource Acquisition Is Initialization) 对 thread 进行封装:
#include <iostream> #include <thread> class ThreadRAII { public: ThreadRAII(std::thread &t) : t_(t) {} ~ThreadRAII() { if (t_.joinable()) { t_.detach(); } } private: std::thread& t_; }; int main(int argc, char **argv) { std::thread t([]() { std::cout << "thread id: " << std::this_thread::get_id() << std::endl; }); ThreadRAII wrapper_t(t); // If we comment this Line, then program will crash return 0; }
传递参数给线程
#include <iostream> #include <string> #include <thread> void thread_callback(int x, const std::string &str) { std::cout << "x: " << x << " str: " << str << std::endl; } int main(int argc, char **argv) { int x = 0; std::string str = "hello, world"; // directly pass params to std::thread's constructor std::thread t1(thread_callback, x, str); t1.join(); return 0; }
注意,小心传递局部变量或者动态内存的地址和指针,不同线程难以保证指针是否有效。对于真正要共享的内容,要记得 加锁 。
传递引用
默认传参给线程会拷贝一份参数的值到线程,即使声明了引用参数也无法改变外部变量,如何传递引用?可以用 std::ref():
#include <iostream> #include <string> #include <thread> void thread_callback(const int &x) { int &y = const_cast<int&>(x); // 强制转换为非 const ++y; std::cout << "inside thread x: " << x << std::endl; } int main(int argc, char **argv) { int x = 9; std::cout << "main thread, before t1 starts, x: " << x << std::endl; std::thread t1(thread_callback, x); t1.join(); std::cout << "main thread, after t1 joins, x: " << x << std::endl; return 0; } /* main thread, before t1 starts, x: 9 inside thread x: 10 main thread, after t1 joins, x: 9 */ // 可以看到,即使声明了引用参数,也没有改变 main thread 中 x 的值
使用 std::ref:
#include <iostream> #include <string> #include <thread> void thread_callback(const int &x) { int &y = const_cast<int&>(x); // 强制转换为非 const ++y; std::cout << "inside thread x: " << x << std::endl; } int main(int argc, char **argv) { int x = 9; std::cout << "main thread, before t1 starts, x: " << x << std::endl; std::thread t1(thread_callback, std::ref(x)); t1.join(); std::cout << "main thread, after t1 joins, x: " << x << std::endl; return 0; } /* main thread, before t1 starts, x: 9 inside thread x: 10 main thread, after t1 joins, x: 10 */
传递成员函数
成员函数传递给线程,注意第一个函数参数要传实例的地址:
#include <iostream> #include <thread> #include <string> class A { public: void say_hello(const std::string &str) { std::cout << "hello, " << str << std::endl; } }; int main(int argc, char **argv) { A a; std::thread t1(&A::say_hello, &a, "stranger"); t1.join(); return 0; }
使用 Lock 机制处理多线程数据共享
Race condition
Race condition is a kind of a bug that occurs in multithreaded applications.
多个线程并发地访问同一个地址时,如果不做一些特殊处理,可能会引发意想不到的结果。
Lock 机制
解决 race condition 可以使用 Lock 机制。
#include <iostream> #include <thread> #include <mutex> #include <vector> #include <algorithm> #include <functional> class Count { public: // 多线程写操作,要加锁 void add() { mutex_for_x_.lock(); ++x_; mutex_for_x_.unlock(); } void reduce() { mutex_for_x_.lock(); --x_; mutex_for_x_.unlock(); } int get_count() { return x_; } private: int x_ = 0; std::mutex mutex_for_x_; }; int main(int argc, char **argv) { Count count; std::vector<std::thread> thread_list; for (int i = 0; i < 100; ++i) { if (i % 2 == 1) { thread_list.push_back(std::thread(&Count::add, &count)); } else { thread_list.push_back(std::thread(&Count::reduce, &count)); } } std::for_each(thread_list.begin(), thread_list.end(), std::mem_fn(&std::thread::join)); std::cout << "final count: " << count.get_count() << std::endl; return 0; }
或者使用 std::lock_guard,实现了对 mutex 对象的 RAII:
void add() { // lock_guard 对象出作用域会自动 unlock mutex std::lock_guard<std::mutex> lock_guard(mutex_for_x_); ++x_; }
使用 Condition variable 处理事件响应
假设要实现一个简单的消费者生产者模型,一个线程往队列中放入数据,一个线程从队列中取数据,取数据前需要判断一下队列中确实有数据,由于这个队列是线程间共享的,所以,需要使用互斥锁进行保护,一个线程在往队列添加数据的时候,另一个线程不能取,反之亦然。
mutex 可以完成这个任务,但是却存在着性能问题。消费者每次都要等待锁释放。如果生产者处理开销较大,那么会有不必要的等待开销。
更合适的模型是,生产者往队列中添加完数据后,立刻通知消费者干活,如何实现这种“通知”的机制?C++11 提供了 Condition variable 来帮我们实现多线程之间的 signal 机制。
#include <iostream> #include <thread> #include <functional> #include <mutex> #include <condition_variable> class Application { public: Application() = default; ~Application() = default; void load_data() { std::cout << "loading data...\n"; std::this_thread::sleep_for(std::chrono::milliseconds(1000)); // lock the data std::unique_lock<std::mutex> lock(mutex_); data_loaded_ = true; cond_var_.notify_one(); } void main_proc() { std::cout << "main processing...\n"; std::unique_lock<std::mutex> lock(mutex_); // Start waiting for the Condition Variable to get signaled // wait() will internally release the lock and make the thread to block // as soon as condition variable get signaled, resume the thread and // again acquire the lock. Then check if condition is met or not // if condition is met then continue else again go in wait. cond_var_.wait(lock, [&]() { return data_loaded_; }); std::cout << "main processing done.\n"; } private: bool data_loaded_ = false; std::mutex mutex_; std::condition_variable cond_var_; }; int main(int argc, char **argv) { Application app; std::thread t1(&Application::load_data, &app); std::thread t2(&Application::main_proc, &app); t2.join(); t1.join(); return 0; }
注意 cond_var_.wait() 要和 std::unique_lock 配合使用,不能用 std::lock_guard,因为 wait() 函数会先调用互斥锁的 unlock() 函数,然后再将自己睡眠,在被唤醒后,又会继续持有锁,保护后面的队列操作。而 lock_guard 没有 lock 和 unlock 接口,而 unique_lock 提供了。这就是必须使用 unique_lock 的原因。
关于 std::condition_variable 的成员函数:
wait():It makes the current thread to block until the condition variable get signaled or a spurious wake up happens.notify_one():If any threads are waiting on same conditional variable object then notify_one unblocks one of the waiting threads.notify_all():If any threads are waiting on same conditional variable object then notify_all unblocks all of the waiting threads.
再看一个例子:
#include <iostream> #include <deque> #include <thread> #include <mutex> #include <condition_variable> std::deque<int> q; std::mutex mu; std::condition_variable cond; void function_1() { int count = 10; while (count > 0) { std::unique_lock<std::mutex> locker(mu); q.push_front(count); locker.unlock(); // 注意控制锁的粒度,q.push_front() 之后就不需要保护了,可以提前 unlock cond.notify_one(); // Notify one waiting thread, if there is one. std::this_thread::sleep_for(std::chrono::seconds(1)); --count; } } void function_2() { int data = 0; while ( data != 1) { std::unique_lock<std::mutex> locker(mu); while(q.empty()) { cond.wait(locker); // Unlock mutex and wait to be notified } data = q.back(); q.pop_back(); locker.unlock(); std::cout << "t2 got a value from t1: " << data << std::endl; } } int main() { std::thread t1(function_1); std::thread t2(function_2); t1.join(); t2.join(); return 0; }
使用 std::future 和 std::promise 处理线程的返回值
假设我们要写一个程序,从主线程创建一个线程来压缩一个文件夹,压缩完成后在主线程打印压缩文件名和大小,要求压缩线程返回压缩文件名和文件大小。
第一种方式:通过共享指针实现,向压缩线程传入一个指针变量,利用 mutex,condition variable 完成。
第二种方式:使用 std::future 和 std::promise。
std::futureis a class template and its object stores the future value .std::promiseis also a class template and its object promises to set the value in future . Eachstd::promiseobject has an associatedstd::futureobject that will give the value once set by thestd::promiseobject.- A
std::promiseobject shares data with its associated std::future object.
如图所示:
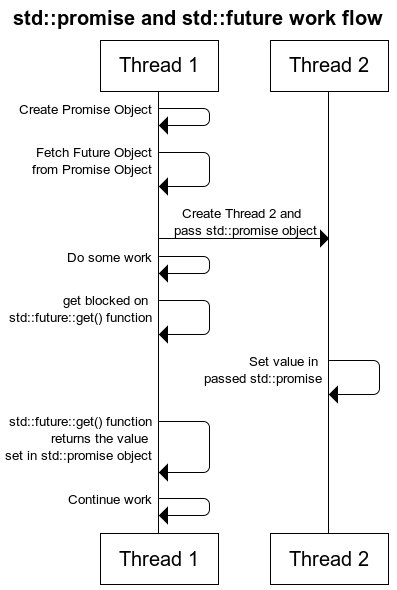
#include <iostream> #include <thread> #include <future> void init(std::promise<int> * promise_obj) { std::cout << "Inside Thread" << std::endl; promise_obj->set_value(42); } int main(int argc, char **argv) { std::promise<int> promise_obj; std::future<int> future_obj = promise_obj.get_future(); std::thread t(init, &promise_obj); std::cout << future_obj.get() << std::endl; // blocked on the std::future::get() function t.join(); return 0; }
C++11 异步调用
std::async
异步操作的主要目的是 让调用方法的主线程不需要同步等待调用函数,从而可以让主线程继续执行它下面的代码 。因此异步操作无须额外的线程负担,使用回调的方式进行处理。在设计良好的情况下,处理函数可以不必或者减少使用共享变量,减少了死锁的可能。当需要执行I/O操作时,使用异步操作比使用线程+同步I/O操作更合适。
异步和多线程并不是一个同等关系, 异步是目的,多线程是实现异步的一个手段 。实现异步可以采用多线程或交给另外的进程来处理。
std::future可以从异步任务中获取结果,一般与std::async配合使用,std::async用于创建异步任务,实际上就是创建一个线程执行相应任务。std::async就是异步编程的高级封装,封装了std::future的操作,基本上可以代替std::thread的所有事情std::async的操作,其实相当于封装了std::promise、std::packaged_task加上std::thread。
std::async:std::async()is a function template that accepts a callback(i.e. function or function object) as an argument and potentially executes them asynchronously.
std::async 的声明:
template <class Fn, class... Args> future<typename result_of<Fn(Args...)>::type> async (launch policy, Fn&& fn, Args&&... args);
std::asyncreturns astd::future<T>, that stores the value returned by function object executed bystd::async(). Arguments expected by function can be passed tostd::async()as arguments after the function pointer argument.
First argument instd::asyncis launch policy, it control the asynchronous behaviour ofstd::async.
std::launch::async,调用即创建线程,在另一个 thread 中执行任务std::launch::deferred,延迟加载方式创建线程,调用时不创建线程,直到调用future的get或者wait时才创建线程(lazy evaluation)
看一个例子:
#include <iostream> #include <string> #include <chrono> #include <thread> #include <future> using namespace std::chrono; std::string fetch_data_from_db(std::string recvd_data) { std::this_thread::sleep_for(seconds(5)); return "DB_" + recvd_data; } std::string fetch_data_from_file(std::string recvd_data) { std::this_thread::sleep_for(seconds(5)); return "File_" + recvd_data; } int main() { system_clock::time_point start = system_clock::now(); // 异步调用,std::launch::async 策略,会立即创建一个线程工作 // 如果改成 std::launch::deferred,那么这个例子就看不到使用异步加速的效果了 std::future<std::string> result_from_db = std::async(std::launch::async, fetch_data_from_db, "Data"); // Fetch Data from File std::string file_data = fetch_data_from_file("Data"); // Fetch Data from DB // Will block till data is available in future<std::string> object. std::string db_data = result_from_db.get(); auto end = system_clock::now(); auto diff = duration_cast < std::chrono::seconds > (end - start).count(); std::cout << "Total Time Taken = " << diff << " Seconds" << std::endl; std::string data = db_data + " :: " + file_data; std::cout << "Data = " << data << std::endl; return 0; }
std::packaged_task
std::promise 通过 set_value 可以使得与之关联的 std::future 获取数据。 std::packaged_task 则更为强大,它允许传入一个函数,并将函数计算的结果传递给 std::future。
std::packaged_task<> is a class template and represents a asynchronous task. It encapsulates:
- A callable entity i.e either function, lambda function or function object.
- A shared state that stores the value returned or thrown exception by associated callback.
看一个例子:
#include <thread> #include <future> #include <iostream> int sum(int a, int b) { return a + b; } int main() { std::packaged_task<int(int, int)> task(sum); std::future<int> future = task.get_future(); // std::promise 一样,std::packaged_task 支持 move,但不支持拷贝 std::thread t(std::move(task), 1, 2); // 等待异步计算结果 std::cout << "1 + 2 => " << future.get() << std::endl; t.join(); return 0; }
使用 std::future 和 std::promise 实现终止线程功能
我们希望能显式控制一个进程的终止,该如何实现?前面提到过了 std::promise 和 std::future,只有当 promise 设置值的时候 future 才会真正获取值,那么可以把 promise::set_value 作为一个通知信号来使用,,检查 future 的状态就知道是不是要结束线程了。
#include <thread> #include <iostream> #include <assert.h> #include <chrono> #include <future> void thread_callback(std::future<void> future_obj) { std::cout << "Thread Start" << std::endl; // 利用 std::future::wait_for() 来控制循环是否终止 // 如果相应的 promise object 调用了 set_value(),那么结束循环 while (future_obj.wait_for(std::chrono::milliseconds(0)) == std::future_status::timeout) { std::cout << "Doing Some Work" << std::endl; std::this_thread::sleep_for(std::chrono::milliseconds(1000)); } std::cout << "Thread End" << std::endl; } int main(int argc, char **argv) { // Create a std::promise object std::promise<void> exit_signal; // Fetch std::future object associated with promise std::future<void> future_obj = exit_signal.get_future(); // Starting Thread & move the future object in lambda function by reference std::thread t(&thread_callback, std::move(future_obj)); // Wait for 10 sec std::this_thread::sleep_for(std::chrono::seconds(10)); std::cout << "Asking Thread to Stop" << std::endl; // Set the value in promise exit_signal.set_value(); // Wait for thread to join t.join(); std::cout << "Exiting Main Function" << std::endl; return 0; }
使用面向对象封装一个 Stoppable 类:
#include <thread> #include <iostream> #include <assert.h> #include <chrono> #include <future> class Stoppable { public: Stoppable() : future_obj_(exit_signal_.get_future()) {} Stoppable(Stoppable &&obj) : exit_signal_(std::move(obj.exit_signal_)), future_obj_(std::move(obj.future_obj_)) {} virtual ~Stoppable() = default; Stoppable& operator=(Stoppable &&obj) { exit_signal_ = std::move(obj.exit_signal_); future_obj_ = std::move(obj.future_obj_); return *this; } virtual void run() = 0; void operator()() { run(); } bool is_stop_requested() { if (future_obj_.wait_for(std::chrono::milliseconds(0)) == std::future_status::timeout) { return false; } return true; } void stop() { exit_signal_.set_value(); } private: std::promise<void> exit_signal_; std::future<void> future_obj_; }; class MyTask : public Stoppable { public: void run() override { std::cout << "Task Start" << std::endl; while (!is_stop_requested()) { std::cout << "Doing Some Work" << std::endl; std::this_thread::sleep_for(std::chrono::milliseconds(1000)); } std::cout << "Task End" << std::endl; } }; int main(int argc, char **argv) { MyTask task; std::thread t([&]() { task.run(); }); std::this_thread::sleep_for(std::chrono::seconds(10)); std::cout << "Asking Task to Stop" << std::endl; task.stop(); t.join(); std::cout << "Thread Joined" << std::endl; std::cout << "Exiting Main Function" << std::endl; return 0; }